

Что такое синхронное вращение?
Что такое синхронное вращение
Частота вращения ротора, при которой работает асинхронный электродвигатель, зависит от частоты питающего напряжения, от мощности текущей нагрузки на валу, и от числа электромагнитных полюсов данного двигателя. Эта реальная частота вращения (или рабочая частота) всегда меньше так называемой синхронной частоты, которая определяется лишь параметрами источника питания и количеством полюсов обмотки статора данного асинхронного двигателя.
Таким образом, синхронная частота вращения двигател я — это частота вращения магнитного поля обмотки статора при номинальной частоте питающего напряжения, и она несколько отличается от рабочей частоты. В итоге количество оборотов в минуту под нагрузкой всегда меньше так называемых синхронных оборотов.
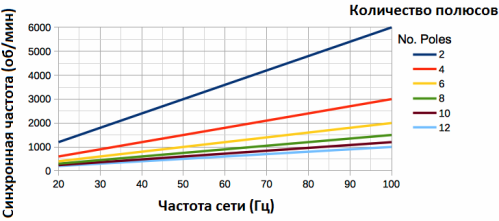
На приведенном рисунке видно, как синхронная частота вращения для асинхронного двигателя с тем или иным количеством полюсов статора зависит от частоты питающего напряжения: чем выше частота — тем выше угловая скорость вращения магнитного поля. Так например в частотно-регулируемых приводах меняя частоту питающего напряжения изменяют синхронную частоту двигателя. При этом изменяется и рабочая частота вращения ротора двигателя под нагрузкой.
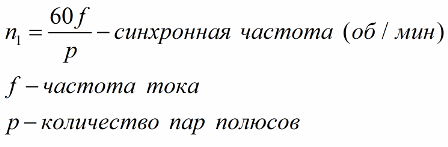
Обычно обмотку статора асинхронного двигателя питают трехфазным переменным током, который и создает вращающееся магнитное поле. И чем больше пар полюсов — тем меньшей будет синхронная частота вращения — частота вращения магнитного поля статора.
Большинство современных асинхронных двигателей имеют от 1 до 3 пар магнитных полюсов, в редких случаях 4, ведь чем больше полюсов — тем ниже КПД асинхронного двигателя. Однако при меньшем количестве полюсов скорость вращения ротора можно менять очень-очень плавно, изменяя частоту питающего напряжения.
Как уже было отмечено выше, реальная рабочая частота асинхронного двигателя отличается от его синхронной частоты. Почему так происходит? Когда ротор вращается с частотой меньшей чем синхронная, то проводники ротора пересекают магнитное поле статора с некоторой скоростью и в них наводится ЭДС. Эта ЭДС создает токи в замкнутых проводниках ротора, в результате данные токи взаимодействуют с вращающимся магнитным полем статора, и возникает крутящий момент — ротор увлекается магнитным полем статора.

Если момент имеет достаточную величину чтобы преодолеть силы трения, то ротор начинает вращаться, при этом момент электромагнитный равен тормозящему моменту, который создают нагрузка, силы трения и т. д.
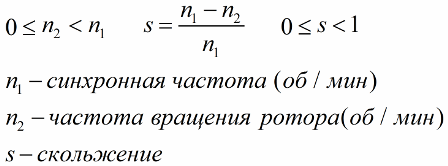
При этом ротор все время отстает от магнитного поля статора, не может рабочая частота достичь синхронной частоты, так как если бы это произошло, то в проводниках ротора перестала бы наводиться ЭДС, и вращающий момент просто не появится. В итоге, для двигательного режима вводят величину «скольжение» (скольжение s, как правило, составляет 2-8%), в связи с чем справедливо и следующее неравенство двигателя:
Но если ротор того же асинхронного двигателя раскрутить при помощи какого-нибудь внешнего привода, например двигателем внутреннего сгорания, до такой скорости, что частота вращения ротора превысит синхронную частоту, то ЭДС в проводниках ротора и активный ток в них приобретут определенное направление, и асинхронный двигатель превратится в генератор.
Общий электромагнитный момент окажется тормозящим, скольжение s станет отрицательным. Но чтобы генераторный режим смог проявить себя, необходимо поставить асинхронному двигателю реактивную мощность, которая бы создавала магнитное поле статора. В момент старта такой машины в генераторном режиме может хватить остаточной индукции ротора и конденсаторов, которые подключают к трем фазам обмотки статора, питающей активную нагрузку.
Что такое синхронное вращение?
Планет, вращающихся синхронно со звездой, оказалось больше, чем считалось
Из числа экзопланет, которые будут обнаружены при помощи новых, мощных телескопов, многие планеты, вероятно, будут находиться в синхронном вращении со звездой – когда одна сторона планеты всегда остается обращена в сторону звезды – согласно новому исследованию, проведенному астрономом Рори Барнсом (Rory Barnes) из Вашингтонского университета, США.
Синхронное вращение, или, по-другому, приливный захват, наблюдается, когда при движении одного небесного тела вокруг другого тела период собственного вращения движущегося тела совпадает с периодом его обращения вокруг центрального тела. Такая ситуация имеет место в случае системы Земля-Луна: период обращения Луны вокруг Земли равен 27 суткам и в точности совпадает по длительности с периодом собственного вращения Луны.
Согласно одной из современных гипотез происхождение Луны связано с космическим столкновением Земли с небесным телом размером с Марс, в результате которого Земля начала вращаться вокруг своей оси с начальным периодом 12 часов. Этот период в ранних исследованиях синхронного вращения экзопланет принимался для моделирования поведения экзопланет и оценки времени, необходимого для того, чтобы планета попала в приливный захват по отношению к родительской звезде.
В своей работе Барнс рассматривает различные начальные периоды вращения планет, от нескольких часов до нескольких недель, и приходит к выводу, что планет, находящихся в синхронном вращении с родительской звездой, на самом деле во Вселенной намного больше, чем предполагалось.
Исследование появилось на сервере предварительных научных публикаций arxiv.org.
Т.е. планеты, которые синхронно вращаются со своей звездой — безжизненны. Я правильно понял?

Masik. Ну, если посмотреть какие именно планеты способны разглядеть нынешние теескопы и где они (планеты) расположены относительно звезды, то вращаются они, не вращаются — сути дела это не меняет, ибо с вероятностью 99% жизни на них нет.
DimitriyP, совершенно верно! Будем надеяться,что и планет,таких как Земля, будет больше чем считается:) Это всё станет понятно,когда техника наша сможет напрямую созерцать экзопланеты. На ИИ вся надежда

Синхронное вращение с главным телом подразумевает, что главное тело делает один оборот вокруг своей оси за то же время, за которое вокруг него обращается спутник, приливной захват это несколько иное.
На примере Земля-Луна, было бы так: Луна бы не только была обращена одной стороной к Земле, но ещё бы «висела» постоянно в одной точке, как геостационарный спутник.

Всё что вычислил Барнс — что планет, находящихся в синхронном вращении с родительской звездой, на самом деле во Вселенной намного больше, чем предполагалось.
Точность вычисления даже меньше чем >, 243  ответить —> ∧ ∨
ответить —> ∧ ∨
А плодовитый этот Барнс оказывается, в плане всяких дурацких исследований. На его счету как минимум ещё работа о пригодности спутников массивных экзопланет к поддержанию жизни на их поверхности. Во, (С)ытата:
«Группа астрономов во главе с Рори Барнсом из Вашингтонского университета, США, определила, что границы обитаемой зоны для спутников планет других звёздно-планетных систем практически совпадают с границами обитаемой зоны для самих планет. Поэтому эти спутники, вероятно, также стоит добавить в списку приоритетных объектов для поисков внеземной жизни.
В настоящее время команда астрономов во главе с Рори Барнсом из Вашингтонского университета, США, определила, что границы обитаемой зоны для спутников экзопланет почти совпадают с границами обитаемой зоны для экзопланет, а потому эти спутники, возможно, стоит добавить к списку приоритетных объектов для поисков внеземной жизни углеродного типа.»
Правда, я так мыслю, это и так было понятно тем, кто 2+2 сложить может, стоило ли так напрягаться?
Чёрт, где они вообще берут идеи для исследований?
Генерация очевидного на рейтинг цитируемости влияет. Повышенная цитируемость — доверие грандодателя.
Да он прям фонтан идей и мыслей! Такой плодовитости даже Донцова позавидует!)))
Умудрился примазаться к работе, посвящённой способу «. сравнивать между собой экзопланеты, чтобы определить, какие из тысяч открытых на сегодня внесолнечных планет требуют более тщательного изучения для поиска на них следов внеземной жизни.» (АстроНьюс)
Так же в соавторстве показал, что «чем больший по величине приливный разогрев испытывает магния планеты, тем эффективнее она отводит тепло от ядра, охлаждая его и способствуя формированию магнитного поля.» (АстроНьюс)
Или вот ещё: «Новое исследование астронома Рори Барнса из университета Вашингтона и его соавторов описывает потенциальные планетарные системы, в которых гравитационный толчок одной планеты при определенной орбитальной конфигурации и наклоне может нести разрушительное воздействие на орбиту и климат другого, возможно обитаемого, мира.» (АстроНьюс 2015)
И ещё: «Родриго Лугер и его соавтор Рори Барнс утверждают, что совместное действие этих двух сил способно превращать необитаемые «мини-Нептуны» — планеты с твердым ядром и толстой водородной атмосферой, лежащие на значительно удаленных от материнской звезды орбитах — в потенциально пригодные для жизни планеты, освобожденные от большей части изначально содержавшегося в них газа, и даже сдвинуть эти планеты вглубь планетной системы звезды на более тесные орбиты вокруг нее.» (АстроНьюс)
И ещё: «В проведенном им и его коллегами исследовании говорится, что наличие спутника у планеты, лежащей близ внешних границ обитаемой зоны звезды, может не увеличить, а, напротив, уменьшить шансы возможного существования на планете жизни. Согласно этой гипотезе, стабилизация наклона оси планеты спутником отрицательно влияет на климатические условия на ней, снижая равномерность распределения по поверхности планеты тепла, получаемого ею от своего светила.» (АстроНьюс)
И, наконец, вишенка на торте! Обратите внимание на тему и дату публикации — ничего не настораживает?)))
«В настоящее время команда астрономов во главе с Рори Барнсом из Вашингтонского университета, США, определила, что границы обитаемой зоны для спутников экзопланет почти совпадают с границами обитаемой зоны для экзопланет, а потому эти спутники, возможно, стоит добавить к списку приоритетных объектов для поисков внеземной жизни.» (АстроНьюс 11.01.2013)
Что такое синхронное вращение?
Схема синхронного вращения при двух асинхронных двигателях с общим реостатом. Эта схема представлена на рис. 36; она состоит из двух асинхронных электродвигателей, статорные обмотки которых подсоединены к общей сети, а обмотки роторов присоединены параллельно к сопротивлению Ra. Необходимую устойчивость работы можно получить только при больших нагрузочных моментах, т.е. при больших величинах скольжения (что приводит к значительным потерям энергии в реостате), и при сравнительно небольшой разнице между нагрузочными моментами. Наличие сопротивления постоянно включенного во вторичную цепь, не позволяет рационально использовать двигатели, так как скорость вращения понижается и величина к. п. д. установки уменьшается. Постоянная схема может работать только при одинаковых параметрах обоих двигателей.
Рис. 36. Схема синхронного вращения двух асинхронных двигателей с общим реостатом
Рекламные предложения на основе ваших интересов:
Рис. 37. Механические характеристики совместной работы двух асинхронных двигателей на общий вал
Совместная работа электродвигателей на общий вал с жесткой механической связью между двигателями.
В строительной практике иногда прибегают к устройству электропривода с установкой двух двигателей на одном общем валу (мощные экскаваторы, крупные виброплощадки и др.).
Механическая характеристика такого привода представляет собой сумму характеристик отдельных двигателей.
В большинстве случаев асинхронные двигатели переменного тока одинаковой номинальной мощности имеют различные механические характеристики. На рис. 37 приведены механические характеристики двух двигателей 1 и 2 и общая характеристика привода 3. При каком-либо нагрузочном моменте, например Мл, привод будет вращаться со скоростью щ об/мин. Проведя горизонталь через точку А, найдем моменты М и Мг, развиваемые при этом двигателями. Как видно, больший момент нагрузки будет иметь двигатель с более жесткой механической характеристикой, что может вызвать его перегрев. Поэтому при установке двигателей, одинаковых по мощности, но с различными механическими характеристиками, необходимо во вторичную цепь двигателя с более жесткой характеристикой включать активное сопротивление соответствующей величины. Таким путем можно добиться того, что двигатели будут развивать одинаковые моменты в значительном диапазоне нагрузки.
Если для совместной работы устанавливаются электродвигатели различной номинальной мощности, то следует тщательно подобрать соответствующей величины добавочное сопротивление в цепи ротора одного из них.
Схема синхронного вращения с асинхронными вспомогательными машинами. Эта система включает два или несколько элементов, каждый из которых в свою очередь состоит из главного или рабочего двигателя и жестко связанной с ним вспомогательной машины. Отдельные элементы системы не имеют механической связи между собой. Наиболее простой является система из двух элементов. Каждый элемент состоит из главного приводного двигателя, связанного с валом производственного механизма, и вспомогательной или синхронизирующей электрической машины.
Вспомогательные или синхронизирующие машины служат для синхронизации хода валов двух производственных механизмов. Данная система синхронного вращения двигателей является устойчивой при различных нагрузках на валы производственных механизмов. Недостаток ее — необходимость иметь дополнительные машины, которые удорожают установку и усложняют ее эксплуатацию.
Синхронное вращение



Синхронное вращение (приливный захват) — ситуация, когда период обращения спутника вокруг своей оси совпадает с периодом его обращения вокруг центрального тела. При этом спутник всегда обращён к центральному телу одной и той же стороной, поскольку он обращается вокруг своей оси за то же время, которое ему требуется, чтобы обернуться по орбите вокруг своего партнёра. Приливный захват происходит в процессе взаимного движения и характерен для многих крупных естественных спутников планет Солнечной системы, а также используется для стабилизации некоторых искусственных спутников. Если разница в массах между двумя телами невелика, то они оба могут быть в приливном захвате друг относительно друга, как в случае с Плутоном и Хароном
При наблюдении синхронного спутника с центрального тела всегда видна только одна сторона спутника. При наблюдении с этой стороны спутника центральное тело «висит» в небе неподвижно. С обратной же стороны спутника центрального тела никогда не видно.
Когда ось собственного вращения спутника не перпендикулярна плоскости орбиты, наблюдаются либрации по широте, а когда орбита спутника имеет форму эллипса, а не окружности, то либрации по долготе.
Синхронное вращение является равновесным состоянием в небесной механике. Если изначально период обращения спутника вокруг планеты и период его обращения вокруг оси различны, возникают приливные волны, тормозящие или разгоняющие вращение вокруг оси.
Примеры [ править ]
Большинство крупных спутников планет в Солнечной системе синхронизированы со своими центральными телами, так как их орбиты довольно малы, а приливные силы усиливаются обратно пропорционально кубу расстояния. Заметными исключениями являются нерегулярные спутники газовых гигантов, чьи орбиты пролегают существенно дальше орбит крупных спутников.
Наиболее известный и доступный для наблюдения пример — Луна, которая является синхронным спутником Земли. Оба естественных спутника Марса — Фобос и Деймос — имеют синхронное вращение. Крупные спутники Юпитера, Сатурна и Урана являются синхронными. Крупнейший спутник Нептуна Тритон также имеет синхронное вращение
Плутон и Харон — это яркий пример приливного захвата. Харон — очень большая луна относительно своего центрального тела и вращается вокруг него на небольшой орбите. Это заставило Плутон также обрести приливный захват по отношению к Харону. В результате два этих тела вращаются вокруг друг друга (барицентр системы лежит над поверхностью Плутона), словно соединённые тросом в двух противостоящих друг другу точках их поверхности.
Приливный захват астероидов по большей части неизвестен, но следует ожидать, что близко вращающиеся пары также должны быть в приливном захвате относительно друг друга.
Все о частотных преобразователях

Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f — частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
Асинхронные и синхронные двигатели
Чтобы производственные механизмы работали с максимальной эффективностью, необходимо правильно подобрать электрический двигатель, который будет применяться в качестве привода. В этой статье мы рассмотрим, чем отличаются асинхронные и синхронные двигатели с точки зрения конструктивных особенностей, функциональности и экономичности.
Асинхронные и синхронные двигатели: устройство
Электрические двигатели представляют собой агрегаты для преобразования электроэнергии в энергию механическую. Основу конструкции двигателя (как синхронного, так и асинхронного типа) составляют следующие элементы:
- неподвижный (статор);
- вращающийся (ротор).
Статоры электродвигателей обеих категорий имеют схожий принцип устройства. В специальные пазы (осевые прорези) уложены токонесущие проводки из меди или алюминия. Функцией статора является создание вращающегося магнитного поля. Ротор (с обмоткой возбуждения) закреплен на валу двигателя и вращается под воздействием возникающей электродвижущей силы.
В чем ключевое отличие синхронного двигателя от асинхронного
Главное отличие синхронного от асинхронного двигателя заключается в устройстве ротора.
Роторы синхронных двигателей представляют собой постоянные или электрические магниты. Постоянное магнитное поле, создаваемое ими, взаимодействует с вращающимся магнитным полем статора.
В случае с асинхронным двигателем (который также называют индукционным) в пазы ротора вставляются короткозамкнутые металлические пластины. Кроме короткозамкнутой разновидности, применяются также фазные роторы, снабженные контактными кольцами, которые после разбега замыкаются накоротко.
В результате соотношение частоты оборотов двигателя, находящегося под нагрузкой, с частотой вращения, которая присуща магнитному полю статора, для разных типов двигателя следующее:
- равное для агрегатов синхронного типа;
- неравное для асинхронных двигателей (наблюдается постоянное отставание от скорости вращения магнитного поля статора, равное величине скольжения).
На основе понимания того, чем отличается асинхронный двигатель от синхронного, можно сформулировать главные преимущества и недостатки этих двигателей.
Сравнение разных типов двигателей
Двигатели синхронной разновидности сложнее в использовании, поскольку они:
- в отличие от асинхронных моделей нуждаются в дополнительном источнике постоянного тока;
- подвержены более быстрому износу деталей (по причине использования контактных колец со щетками);
- требуют применения вспомогательных механизмов для запуска (индукционный двигатель имеет собственный пусковой момент).
Для асинхронных моделей характерны:
- простота конструкции;
- надежность в эксплуатации.
При этом синхронные двигатели обладают более широкими возможностями с точки зрения коэффициента мощности, а также менее чувствительны к перепадам напряжения, но стоимость таких агрегатов выше, что делает их использование менее выгодным.
Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета.
Синхронная скорость вращения обычных асинхронных двигателей выражается как:
- n = 60*f *2 / p(1)
- где
- n= скорость вращения штока (об/мин, rpm)
- f= частота (ГЦ=Hz; оборотов/с; 1/с)
- p=число полюсов, . если формула дается в виде n = (60*f ) / p, то под p понимается число пар полюсов, а не число полюсов.
Пример — синхронная скорость четырехполюсного электродвигателя:
Если двигатель запитан напряжением 60Гц , синхронная скорость считается так:
n = (60*60) (2 / 4) = 1800 об/мин
Таблица синхронной скорости вращения асинхронных электродвигателей в зависимости от частоты и числа полюсов:
Таблица синхронной скорости вращения асинхронных электродвигателей в зависимости от частоты и числа полюсов:| Скорость вращения электромотора, электродвигателя: об/мин | ||||||
|---|---|---|---|---|---|---|
| Частота — f — (Гц=Hz) |
Число полюсов — p — | |||||
| 2 | 4 | 6 | 8 | 10 | 12 | |
| 10 | 600 | 300 | 200 | 150 | 120 | 100 |
| 20 | 1200 | 600 | 400 | 300 | 240 | 200 |
| 30 | 1800 | 900 | 600 | 450 | 360 | 300 |
| 40 | 2400 | 1200 | 800 | 600 | 480 | 400 |
| 50 1) | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 60 2) | 3600 | 1800 | 1200 | 900 | 720 | 600 |
| 70 | 4200 | 2100 | 1400 | 1050 | 840 | 700 |
| 80 | 4800 | 2400 | 1600 | 1200 | 960 | 800 |
| 90 | 5400 | 2700 | 1800 | 1350 | 1080 | 900 |
| 100 | 6000 | 3000 | 2000 | 1500 | 1200 | 1000 |
Консультации и техническая
поддержка сайта: Zavarka Team
Регулирование частоты вращения асинхронных двигателей
Регулирование частоты вращения двигателей определяется в соответствии с требованиями технологических процессов и тех производственных механизмов, в которых они используются. Оно характеризуется следующими основными показателями.
Диапазон регулирования Д (предел изменения частоты вращения). Под этой величиной понимается отношение максимальной частоты вращения двигателя к его минимальной частоте вращения.
Плавность регулирования, которая характеризуется минимальным скачком частоты вращения двигателя при переходе с одной механической характеристики на другую.
Направление возможного изменения частоты вращения двигателя (зона регулирования).
При номинальных условиях работы (напряжении и частоте питающей сети) двигатель имеет естественную механическую характеристику. При регулировании частоты вращения соответствующие им характеристики будут отличаться от естественной. Эти характеристики носят название искусственных (регулировочных) характеристик. С помощью одних методов регулирования удается получить искусственные характеристики, располагающиеся только ниже естественной. Другие методы обеспечивают регулирование частоты вращения выше и ниже естественной характеристики. Экономичность регулирования определяется по дополнительным капитальным затратам, необходимым при создании регулировочных устройств, а также по потерям электроэнергии при регулировании.
Следует отметить, что в ряде случаев, например для механизмов, работающих сравнительно малое время на искусственных характеристиках, потери электроэнергии даже при неэкономичных способах регулирования будут невелики (работа на низких доводочных скоростях лифтов, кранов и др.). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
Допустимая нагрузка двигателя при работе его на регулировочных характеристиках ограничивается величинами токов в статорной и роторных цепях. Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигателя и механизма и т. д.
Регулирование частоты вращения асинхронных двигателей может производиться способом воздействия на него со стороны статора или со стороны ротора. Все три способа нашли широкое применение на практике. Рассмотрим эти способы подробнее.
Регулирование частоты вращения изменением частоты питающей сети является наиболее экономичным способом регулирования и позволяет получить хорошие механические характеристики электропривода. При изменении частоты питающей сети обеспечивается изменение частоты вращения магнитного поля асинхронного двигателя. Источник питания двигателя должен осуществлять преобразование напряжения стандартной частоты сети 50 Гц в напряжение с требуемой частотой. Одновременно с изменением частоты должна регулироваться по определенному закону и величина подводимого к двигателю напряжения, чтобы обеспечить высокую жесткость механической характеристики и требуемую перегрузочную способность двигателя. При регулировании частоты вращения асинхронных двигателей изменением частоты питающей сети можно обеспечить различные режимы работы: с постоянным вращающим моментом; с постоянной мощностью на валу; с моментом, пропорциональным квадрату частоты.
Зависимости между регулируемыми напряжением и частотой с учетом влияния активного сопротивления статора, изменения жесткости механических характеристик, насыщения стали, ухудшения теплоотдачи на низких частотах вращения ротора двигателя имеют довольно сложный характер. В качестве источника питания могут применяться электромашинные вращающиеся преобразователи, использующие электрические машины, или статические преобразователи частоты на полупроводниковых приборах, которые серийно выпускает промышленность. Положительным свойством частотного регулирования является возможность плавного регулирования в широком диапазоне в обе стороны от естественной характеристики (в том числе возможно вращение двигателя с частотой, большей номинальной). При регулировании обеспечивается жесткость характеристик и высокая перегрузочная способность. Однако в ряде случаев в приводах металлообрабатывающих станков, электрошпинделей, мощных воздуходувок и других механизмов частотное регулирование является наиболее приемлемым.
Регулирование частоты вращения изменением числа полюсов в обмотке статора обеспечивается благодаря изменению частоты вращения магнитного поля статора. При неизменной частоте питающей сети частота вращения магнитного поля и определяемая ею частота вращения ротора изменяются обратно пропорционально числу полюсов. Так как число полюсов, фиксированное ступенями, может быть равно 2, 4, 6, 8, 10 и т. д., что при частоте питающей сети, равной 50 Гц, соответствует синхронной частоте вращения 3000, 1500, 1000, 750, 600 об/мин и т. д., то указанным способом может быть обеспечено только ступенчатое регулирование.
Кроме двухскоростных асинхронных двигателей нашли применение трехскоростные и четырехскоростные двигатели. В трехскоростных двигателях размещаются одна переключаемая и одна непереключаемая обмотка, а в четырехскоростных — две переключаемые обмотки, позволяющие получить четыре синхронные частоты вращения, например 3000/1500/1000/500 об/мин. Двигатели с переключением числа пар полюсов, как правило, имеют короткозамкнутый ротор с обмоткой типа беличьей клетки. Такой ротор обеспечивает возможность работы без дополнительных пересоединений в его цепи. В случае фазного ротора в многоскоростных двигателях потребовалось бы производить переключения одновременно на статоре и роторе, что усложнило бы конструкцию ротора и эксплуатацию таких машин. К положительным показателям многоскоростных асинхронных двигателей следует отнести экономичность и относительно большой диапазон регулирования частоты вращения ротора. Недостатком данного способа регулирования является указанная выше невозможность плавного изменения частоты вращения.
Как отмечалось, в рамках единой общепромышленной серии асинхронных двигателей 4А выпускается модификация многоскоростных двигателей, предназначенных для работы на двух, трех или четырех скоростях. Регулирование частоты вращения изменением скольжения является одним из простых способов регулирования. В то же время при изменении (увеличении) скольжения изменяются (увеличиваются) потери в обмотке ротора, что приводит к уменьшению КПД при регулировании.
Регулирование скольжения можно осуществлять как со стороны статора, так и со стороны ротора. Естественно, что во втором случае ротор должен быть фазным и иметь выведенную на контактные кольца обмотку. При регулировании со стороны статора изменяют приложенное к его обмотке напряжение. Увеличение напряжения сверх номинального приводит к насыщению магнитной цепи двигателя и потому не применяется.
Для регулирования частоты вращения уменьшают напряжение питания. При этом развиваемый двигателем момент изменяется пропорционально квадрату напряжения и соответственно изменяются механические характеристики двигателя, в результате чего изменяются и значения рабочих скольжений. При регулировании со стороны ротора в основном применяется реостатное регулирование частоты вращения путем введения в цепь обмотки ротора добавочных активных сопротивлений (резисторов). При этом важно заметить, что изменение в широких пределах частоты вращения двигателя при данном способе регулирования не повлечет за собой изменения максимального (критического) момента. Таким образом, перегрузочная способность двигателя при регулировании не снижается.
Что такое синхронное вращение?
Главное меню
- Главная
- Паровые машины
- Двигатели внутреннего сгорания
- Электродвигатели
- Автоматическое регулирование двигателей
- Восстановление и ремонт двигателей СМД
- Топливо для двигателей
- Карта сайта
Судовые двигатели
- Судовые двигатели внутреннего сгорания
- Судовые паровые турбины
- Судовые газовые турбины
- Судовые дизельные установки
При многодвигательном электроприводе иногда требуется, чтобы несколько электродвигателей, удаленных друг от друга на значительное расстояние, вращались с одинаковой скоростью. Такие случаи имеют место в электроприводах экскалаторов, прокатных станов, механизмов передвижения перегрузочных мостов, некоторых типов грейферных лебедок и др. Вращение электродвигателей, имеющих различную нагрузку, с одинаковой скоростью называется согласованным. Согласованное вращение может быть осуществлено путем механического соединения их валов. Однако при значительном удалении машин друг от друга, а также при неудобном их расположении механическое соединение зачастую оказывается затруднительным, так как при этом необходимо применять валы слишком большой длины и диаметра, большое количество подшипников и других механических приспособлений, что увеличивает вес, габариты, стоимость привода и затрудняет его эксплуатацию.
Для обеспечения согласованного вращения электродвигателей при неодинаковых нагрузках разработан ряд электрических схем, позволяющих получить синхронное вращение электродвигателей без использования механических приспособлений. Такие схемы называются системами синхронного вращения. В них используются асинхронные машины, обеспечивающие наиболее надежную работу привода. Различают системы синхронного вращения со вспомогательными синхронизирующими машинами и без вспомогательных машин. В состав любой системы синхронного вращения входят главные электродвигатели, обеспечивающие привод механизмов. В системах первой группы с валами главных электродвигателей соединяются вспомогательные асинхронные или синхронные машины, с помощью которых и осуществляется согласованное вращение главных электродвигателей.
В системах без вспомогательных машин согласованное вращение осуществляется непосредственно за счет главных электродвигателей, соединенных определенным образом между собой.
Нужно иметь в виду, что в системах со вспомогательными машинами возможно применение главных электродвигателей любого типа. Однако системы синхронного вращения с главными электродвигателями постоянного тока применяются сравнительно редко и здесь не рассматриваются. То же самое относится и к системам синхронного вращения со вспомогательными синхронными машинами, которые не обеспечивают согласованного вращения главных электродвигателей в период пуска и торможения и поэтому применяются очень редко.

Для примера рассмотрим систему синхронного вращения, состоящую (рис. 56, а) из двух главных электродвигателей Д 1 и Д 2 и двух вспомогательных асинхронных машин А 1 и A 2 . Машина А 1 насажена на вал главного электродвигателя Д 1 а машина А 2 —на вал электродвигателя Д 2 . Главные электродвигатели могут быть удалены друг от друга на значительное расстояние, однако при любых нагрузках они должны вращаться с одинаковыми скоростями. В качестве главных электродвигателей в схеме используются асинхронные короткозамкнутые электродвигатели. Роль же вспомогательных машин выполняют небольшие асинхронные электродвигатели с контактными кольцами; роторы вспомогательных машин, как показано на схеме, соединены встречно. Статорные обмотки всех четырех машин питаются от общей сети трехфазного тока.
Если главные электродвигатели Д 1 и Д 2 однотипны и имеют одинаковую нагрузку, то вращаются они с одинаковыми скоростями. Вспомогательные машины А 1 и А 2 тоже имеют при этом одинаковую скорость и никаких вращающих моментов не создают. Это объясняется тем, что обмотки роторов вспомогательных машин включены навстречу друг другу. Вследствие этого э. д. е., наводимые в каждой фазе ротора одной вспомогательной машины, уравновешиваются э. д. е., наводимыми в фазах ротора другой машины. Поэтому в обмотках роторов вспомогательных машин токи отсутствуют и никаких вращающих моментов машины не создают, т. е. главные электродвигатели, имея одинаковые механические характеристики, будут вращаться синхронно и без участия вспомогательных машин.
В случае увеличения нагрузки, например, на электродвигатель Д 1 скорость последнего начнет снижаться и между роторами вспомогательных машин А 1 и А 2 возникнет угол рассогласования. В результате э. д. с. их роторных обмоток уравновешиваться не будут и в них появятся уравнительные токи, что приведет к созданию дополнительных вращающих моментов, приложенных к валам I и II.
Нетрудно доказать, что в рассматриваемом случае вспомогательная машина А 1 будет потреблять электроэнергию из сети, а машина А 2 , наоборот, отдавать определенную часть электроэнергии в сеть. Это значит, что синхронизирующая машина А х создает вращающий момент, совпадающий с направлением вращения вала I, а машина А 2 создает момент, направленный навстречу вращению вала II. В результате нагрузки между главными электродвигателями Д 1 и Д 2 уравновесятся и скорость вращения их практически не изменится.
В рассмотренной схеме роторы синхронизирующих машин А 1 и А 2 вращаются в ту же сторону, что и магнитные поля их статоров, т. е. «по полю». Скольжения в этих случаях сравнительно невелики, поэтому нет оснований ожидать, что вспомогательные машины будут создавать большие синхронизирующие моменты. Действительно, величина э. д. с. роторной обмотки асинхронной машины зависит от скольжения. Чем меньше скольжение, тем меньше величины э. д. е., наводимой в обмотке ротора, и тем меньше уравнительные токи, протекающие между роторными обмотками вспомогательных машин при нарушении равновесия. По этой причине синхронизирующие моменты, создаваемые вспомогательными машинами А 1 и А 2 , сравнительно невелики и при большей разности нагрузок между двигателями Д 1 и Д 2 вспомогательные машины, включенные по схеме, изображенной на рис. 56, а, могут не обеспечить синхронного вращения валов I и II. Этим и объясняется сравнительно редкое использование на практике рассмотренной схемы. Значительно чаще применяется система синхронного вращения асинхронных электродвигателей со вспомогательными машинами, вращающимися «против поля» (рис. 56,б), получившая название «электрического вала». Эта схема работает практически так же, как и предыдущая. Разница состоит только в том, что здесь роторы вспомогательных машин А 1 и А 2 под действием главных электродвигателей Д 1 и Д 2 вращаются в сторону, противоположную направлению вращения магнитного поля статора. Поэтому при рассогласовании системы, когда нагрузки на двигатели Д 1 и Д 2 будут неодинаковы, вращающие моменты, создаваемые синхронизирующими машинами, будут значительно выше, чем в первом случае, а это обусловливает большую надежность схемы и согласованность вращения главных электродвигателей Д 1 и Д 2 практически при любых нагрузках.
Схема «электрического вала» обеспечивает синхронное вращение главных электродвигателей не только при значительной разнице моментов статического сопротивления в установившихся электродвигательном и тормозных режимах работы, но и при переходных процессах (во время пусков и реверсов). Однако ее главным недостатком является большое количество электрических машин, что усложняет привод и увеличивает его стоимость.
При небольшой разнице в нагрузках согласованное вращение асинхронных электродвигателей может быть достигнуто без использования вспомогательных синхронизирующих машин. Для этого главные электродвигатели Д 1 и Д 2 необходимо включать по схеме, показанной на рис. 57. Как и в предыдущих схемах, статорные обмотки электродвигателей питаются от общей сети трехфазного тока, а роторы включены навстречу друг другу и присоединены к реостату (для увеличения скольжения при различных нагрузках электродвигателей). Если электродвигатели Д 1 и Д 2 нагружены одинаково и вращаются строго синхронно, э. д. с., наводимые в роторных обмотках, равны по величине и направлены навстречу друг другу.

Если из-за неравенства нагрузки один из роторов отстанет от другого, в проводах, соединяющих роторы, появится уравнительный ток, который создаст для более нагруженной машины дополнительный двигательный, а для менее нагруженной машины дополнительный тормозной момент. Последнее приведет к тому, что нагрузки на электродвигатели станут равными и они будут вращаться синхронно.
Система синхронного вращения без вспомогательных машин отличается простотой, обеспечивает синхронное вращение главных электродвигателей в установившемся двигательном режиме и тормозном режиме противовключения. Однако величина синхронизирующего момента, как указывалось, зависит от величины э. д. с. ротора, а последняя, в свою очередь, от скольжения, при котором работает машина. Поэтому при малых величинах скольжения синхронизирующий момент, создаваемый электродвигателями, будет мал, и электродвигатели, будучи выведены из состояния синхронной работы, вернуться в нее не смогут, так как даже при сравнительно небольшой разнице в моментах статического сопротивления (10—15%) скольжение должно быть не менее 20—25%. Поэтому чтобы электродвигатели вращались синхронно, необходимо искусственно увеличивать их скольжение введением дополнительных сопротивлений в роторные цепи, что приводит к увеличению потерь мощности.
Рассматриваемая система имеет и недостатки. При отключении электродвигателей от сети их синхронное вращение нарушается. Это приводит к тому, что при последующем пуске могут возникнуть недопустимо большие пусковые токи и моменты из-за возможного значительного угла рассогласования роторов. Для предотвращения этого схему приходится усложнять и она практически теряет все свои преимущества. Поэтому эта схема применяется сравнительно редко, хотя стоимость установки меньше предыдущей.

